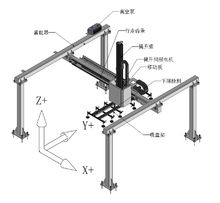
桁架机器人主要由多维机器人行走轴搭建而成,各机器人行走轴由重载铝型材、滚轮直线导轨和伺服电机等组成。作为运动框架和载体的重载铝型材其截面形状通过有限元分析法来优化设计,生产中的精益求精确保其强度和直线度。采用滚轮V型导轨作为运动导轨。运动传动机构采用同步带,齿轮齿条或滚珠丝杠。康道科技的桁架机器人采用型材或方钢做为主框架,镶嵌直线滑动导轨和齿轮齿条等组成,作为运动框架和载体的精制型材其截面形状通过有限元分析法来优化设计,生产中的精益求精确保其强度和直线度。各种导轨在各行业中经多年大量实用和不断完善使其在可靠性、降噪音、承载力、免维护等方面及整体性能均达到世界*优。
桁架式机器人的空间运动是用三个相互垂直的直线运动来实现的。桁架式机械手的控制核心通过工业控制器(如:PLC,运动控制,单片机等)实现。由于直线运动易于实现全闭环的位置控制,所以,桁架式机器人有可能达到很高的位置精度(μm级)。为了实现一定的运动空间,桁架式机器人的结构尺寸要比其他类型的机器人的结构尺寸大得多。桁架式机器人的工作空间为一空间长方体。通过控制器对各种输入(各种传感器,按钮等)信号的分析处理,做出一定的逻辑判断后,对各个输出元件(继电器,电机驱动器,指示灯等)下达执行命令,完成X,Y,Z三轴之间的联合运动,以此实现一整套的全自动作业流程。
联系电话:1772978058 |